







Un equipo internacional de científicos liderados por Hans Briegel, Vedran Dunjko y Adi Makmal —del Instituto de Óptica e Información Cuántica (IQOQI) en la Academia Austríaca de Ciencias y el Instituto de Física Teórica de la Universidad de Innsbruck en Austria— y, Miguel Ángel Martín-Delgado y Giuseppe Davide Paparo —investigadores miembros del Consorcio Científico QUITEMAD y el Instituto de Física Teórica de la Universidad Complutense de Madrid en España—, ha logrado demostrar por primera vez que las tecnologías y herramientas de la física cuántica pueden ser incorporadas en robots de inteligencia artificial, proveyéndoles de aceleración óptima en aprendizaje activo y más eficiencia en los procesos de toma de decisiones basadas en experiencias anteriores, en situaciones en las que el robot de IA realiza exploración de su entorno ambiental donde el tiempo de respuesta es un factor crítico.
Los resultados de esta investigación constituyen un gran avance en inteligencia artificial hacia el objetivo de crear un robot de inteligencia en aprendizaje autónomo y creatividad, que no sean diseñado solo para tareas específicas como sucede con el usual robot clásico. El uso de tecnología cuántica nos acerca más hacia el logro trascendental de construir robots cuánticos’ que sean capaces de ganancias ilimitadas en rapidez y eficacia.
“Nuestro modelo de robot de inteligencia artificial llega a una conclusión ‘racional’ con mucha más rapidez, debido al uso de tecnología cuántica, pudiendo recordar experiencias anteriores a la vez que realiza la búsqueda de respuestas para la mejor acción”, dice Hans Briegel. Así se ha desarrollado un modelo de inteligencia artificial que usa una forma de paralelismo cuántico.
La importancia de la inteligencia artificial está en aumento en muchas áreas. Los robots y las máquinas autónomas están asumiendo una variedad cada vez mayor de tareas en nuestra sociedad. En el futuro los agentes artificiales, es decir lo robots con IA, deberán ser cada vez más flexibles, trabajando de manera inteligente serán capaces de aprender en base a experiencias previas, reaccionando de modo autónomo en un entorno que a mayor tamaño y complejidad requerirá, por parte del agente artificial, más tiempo para comparar una situación actual con las experiencias anteriores, en la consecución de una conclusión óptima en el modo de respuesta.
El Modelo de Simulación Proyectiva
Hace dos años Hans Briegel propuso un modelo para un agente de inteligencia artificial (AI) que percibiera las percepciones del ambiente, procesando estas percepciones en un tipo específico de memoria que le permitiera simular internamente posibles futuras acciones. La memoria episódica y de composición (ECM) está constituida de una red de clips, que son fragmentos de experiencias.
Cuando el agente de IA se enfrenta a un nuevo evento, se inicia la realización de búsquedas aleatorias de eventos previos relacionados, usando un proceso llamado paseo (cuántico). El camino a través de la memoria está determinada por las probabilidades de transición modificados de acuerdo a la experiencia previa. De esta manera el agente AI aprende del éxito y el fracaso siendo capaz de crear nuevos clips que luego son integrados como si se hubieran encontrado anteriormente en los eventos de acción-percepción. Esto proporciona al agente una plataforma para proyectarse hacia situaciones simuladas.
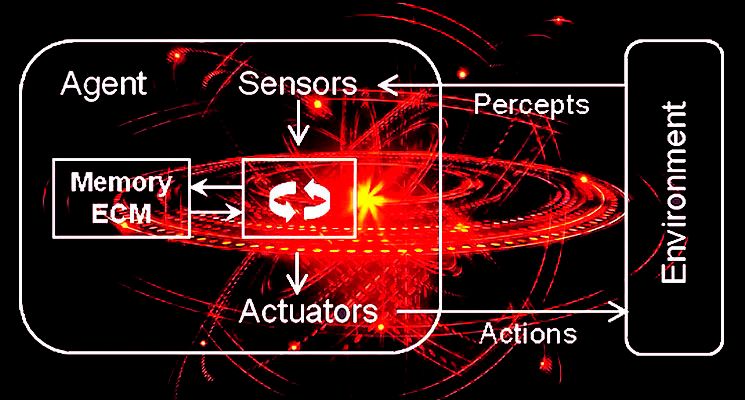
Esquema del funcionamiento de un robot de IA: los sensores le permiten recibir estímulos del entorno, ante los que reacciona mediante los actuadores (brazos o patas robóticas, por ejemplo).
Ahora, los científicos han combinado el concepto de simulación proyectiva con los principios de procesamiento de información cuántica. “Un paseo aleatorio es sustituido por un proceso estocástico cuántico, que permite una exploración más eficiente de las experiencias memorizadas”, explica Vedran Dunjko. “Esta es la razón por la que el agente cuántico es considerablemente más rápido o para ser más precisos, de forma cuadrática más rápido en términos de la adopción de medidas que un agente convencional”. Esta diferencia puede ser vital para muchas aplicaciones, por ejemplo, cuando se piensa en el tema relevante de la conducción automática en automóviles.
El Aprendizaje Activo
La velocidad del proceso de toma de decisiones interna del agente es particularmente importante para el aprendizaje activo. Los robots que operan en un entorno desconocido, que también puede variar con el tiempo, exploran a su propio ritmo. Así, los agentes operativos más rápidos están mejor preparados para actuar en entornos cambiantes rápidos, y tienen más tiempo para probar las nuevas líneas de acción y desarrollar patrones exitosos de comportamiento.
La aplicación de los métodos de la física cuántica a los problemas de inteligencia artificial todavía está en sus inicios, subraya Hans Briegel. “Sin embargo, el estudio y el uso de los sistemas de aprendizaje activo y autónomo en el contexto de los experimentos cuánticos podrían orientar la investigación en direcciones completamente nuevas y emocionantes.”
Financiamiento
La investigación ha sido financiada por varias instituciones, el Austrian Science Fund FWF, la American
Templeton Foundation, la European Commission (PICC), el programa “Quantum Information Technologies in Madrid (QUITEMAD) y, el Ministerio de Economía y Competitividad de España.
Esta investigación está inmersa en una disciplina reciente llamada ‘inteligencia artificial cuántica’ (Quantum AI), un dominio en el que la compañía Google ha empezado a realizar inversiones de millones de dólares en la formación del Laboratorio Cuántico de Inteligencia Artificial en mutua cooperación con la NASA, utilizando a la supercomputadora D-Wave Two.
Fuentes:
Eurekalert http://www.eurekalert.org/pub_releases/2014-10/f-sf-pta100614.php
Innsbruck University http://www.uibk.ac.at/ipoint/news/2014/quantenroboter-lernen-rascher.html.en
Physical Review X http://journals.aps.org/prx/abstract/10.1103/PhysRevX.4.031002
Trad. / Ed.
Gabriel T.E.







0 comentarios :
Publicar un comentario